本帖最后由 杰杰 于 2018-6-8 11:56 编辑
大家好,我是杰杰。
实在不好意思,最近比较忙,之前说的连载现在才更新出来。
从上一篇openmv的学习中,我们可以很简单运用micropython在openmv上做我们想做的事情。 Python这个东西用起来是很简单的,,下面来说说改善色块追踪的算法 先做个改善前的分析吧: 改善前:
API:find_blobs - thresholds是颜色的阈值。这个参数是一个列表,可以包含多个颜色。在返回的色块对象blob可以调用code方法,来判断是什么颜色的色块。
- roi是“感兴趣区”。
- x_stride 就是查找的色块的x方向上最小宽度的像素,默认为2。
- y_stride 就是查找的色块的y方向上最小宽度的像素,默认为1。
- area_threshold 面积阈值,如果色块被框起来的面积小于这个值,会被过滤掉。
- pixels_threshold 像素个数阈值,如果色块像素数量小于这个值,会被过滤掉
- merge 合并,如果设置为True,那么合并所有重叠的blob为一个。 注意:这会合并所有的blob,无论是什么颜色的。如果你想混淆多种颜色的blob,只需要分别调用不同颜色阈值的find_blobs。
blobs = img.find_blobs([red])find_blobs对象返回的是多个blob的列表。而一个blobs列表里包含很多blob对象,blobs对象就是色块,每个blobs对象包含一个色块的信息。 blob有多个方法: blob.rect() 返回这个色块的外框——矩形元组(x, y, w, h),可以直接在image.draw_rectangle中使用。 blob.x() 返回色块的外框的x坐标(int),也可以通过blob[0]来获取。 blob.y() 返回色块的外框的y坐标(int),也可以通过blob[1]来获取。 blob.w() 返回色块的外框的宽度w(int),也可以通过blob[2]来获取。 blob.h() 返回色块的外框的高度h(int),也可以通过blob[3]来获取。 blob.pixels() 返回色块的像素数量(int),也可以通过blob[4]来获取。 blob.cx() 返回色块的外框的中心x坐标(int),也可以通过blob[5]来获取。 blob.cy() 返回色块的外框的中心y坐标(int),也可以通过blob[6]来获取。 blob.rotation() 返回色块的旋转角度(单位为弧度)(float)。如果色块类似一个铅笔,那么这个值为0~180°。如果色块是一个圆,那么这个值是无用的。如果色块完全没有对称性,那么你会得到0~360°,也可以通过blob[7]来获取。 blob.code() 返回一个16bit数字,每一个bit会对应每一个阈值。 (上面的知识在openmv的官网上都有说明)
下面是说说调用find_blobs来做色块的追踪的原理 它是全幅图像扫描,它有优点也有缺点 先说说优点吧:信息全面,全幅图像的搜索,把所有色块都搜索进来了 但是缺点也不少:①:运算的速度,是很慢的,有些地方我们根本不需要扫描它。 ②:色块的数量,很多时候,会有很多延时差不多的色块过来干扰,导致追踪失败。 源码: [mw_shl_code=python,true]import sensor, image, time
red_threshold_01 = (0, 35, 0, 50, -10, 40)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold_01],
area_threshold=150)
if blobs:
#如果找到了目标颜色
print(blobs)
for b in blobs:
#迭代找到的目标颜色区域
# Draw a rect around the blob.
img.draw_rectangle(b[0:4]) # rect
#用矩形标记出目标颜色区域
img.draw_cross(b[5], b[6]) # cx, cy
#在目标颜色区域的中心画十字形标记
print(clock.fps())[/mw_shl_code]
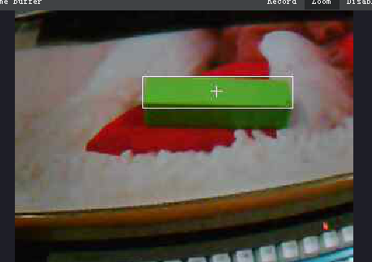
效果图: 运算速度: 从拍摄完到扫描完,每秒只能处理二十多帧图像,而且是简单的处理。 虽然脱机运行速度可以快一倍。但是还是比较慢的。 肯定要改进啊。

以下是改进扫描算法的思想:
①:首先做一次全幅图像的扫描,找到我们需要的色块。
②:我们得到色块的信息:如色块的长、宽、及色块的位置
③:我们只扫描色块周围的区域(ROI)
④:假设在新的ROI找不到我们需要的色块,就重新来。
这个方法类似于飞思卡尔的边缘检测。
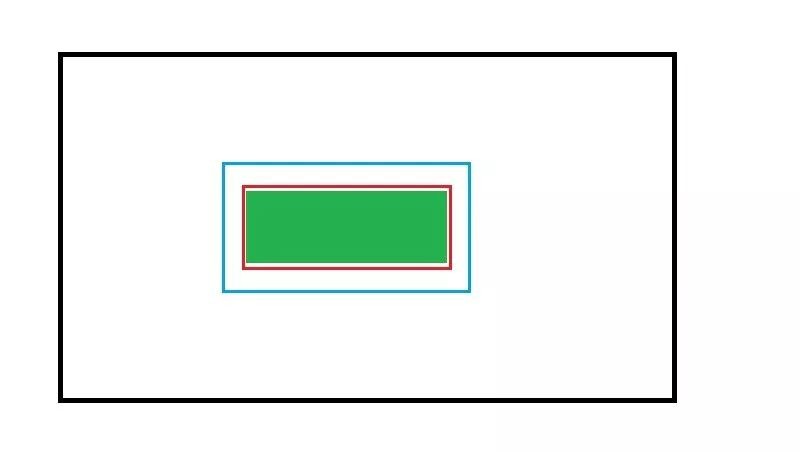
其实这个改进是非常简单的。因为我们需要的东西在microPython中全部都有。 只需要拿到find_blobs的返回的东西就好啦。 算法示意图
绿色的是我们追踪的色块, 而红色的框是我们第一次全局扫描得到的东西 蓝色就是我们需要扫描的区域 那么我们只需在红色的框之外做一次扫描就能得到绿色块啦 实现的源码
[mw_shl_code=python,true]import sensor, image, time
#red_threshold_01 = (45, 100, -60, 80, 34, 91)
red_threshold_01 = (21, 29, -72, 6, -11, 17)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(20)
sensor.set_auto_whitebal(False)
#关闭白平衡。白平衡是默认开启的,在颜色识别中,需要关闭白平衡
clock = time.clock()
img = sensor.snapshot()
blobs = img.find_blobs([red_threshold_01],
area_threshold=150)
last_blobs = blobs
while(True):
clock.tick()
img = sensor.snapshot()
if last_blobs:
for b in blobs:
x1 = b[0]-7
y1 = b[1]-7
w1 = b[2]+12
h1 = b[3]+12
#print(b.cx(),b.cy())
roi2 = (x1,y1,w1,h1)
print(roi2)
blobs = img.find_blobs([red_threshold_01],
roi = roi2,
area_threshold=1000)
last_blobs = blobs
else:
blobs = img.find_blobs([red_threshold_01],
area_threshold=1000)
last_blobs = blobs
if last_blobs:
#如果找到了目标颜色
# print(blobs)
for b in last_blobs:#迭代找到的目标颜色区域
img.draw_rectangle(b[0:4])
img.draw_cross(b[5], b[6])
print("帧率 : ",clock.fps()) [/mw_shl_code]
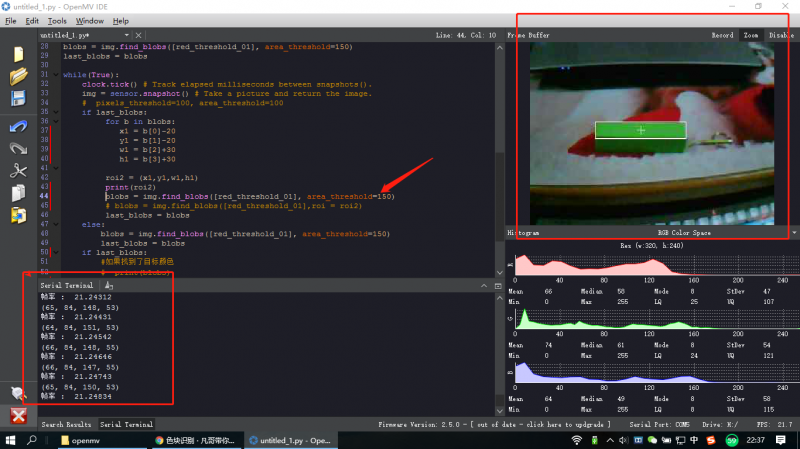
改善后的帧率的确是快了不少的:基本能快一倍以上,当然,物体在图片越大,处理的速度会越慢。 帧率达到了 45 ,并且,对于运动中的物体,也能很好的追踪出来,减少无关物体的干扰。
按照这个思想,我们还能把这个物体分成四条边来扫描: 那么是不是只需要扫描到这个物体的四条边,并且证明四条边的点都有重合,那么,我们就能知道这个物体是一个整体从而得到物体的位置。。。。 当然,这只是想法。对于程序员任何的功能想法的实现都需要代码的实现,这代码我就不实现了,有兴趣的可以试试。。。
| 



 发表于 2018-6-8 11:54:04
发表于 2018-6-8 11:54:04


 提升卡
提升卡 发表于 2018-6-8 16:19:36
发表于 2018-6-8 16:19:36

 楼主
楼主